
Paul Russo is from Geo Semiconductor which makes processors for HUDs. He started by saying that once you have a remote control for your TV, you will want one for ever. The same applies to HUDs, once you have tried one, you will always want one in any car you drive. He introduced the main speaker, Edmund Tan who talked about the issues in HUDs and what you have to do to map the image for a HUD. The image is focused at optical infinity to allow reading without re-focusing. The HUD can then implement augmented reality.
There is a display unit, with mirrors, which can be adjusted to optimise the image on the windscreen. In the future, we will see HUDs with larger field of view and higher resoluton for, effectively, augmented reality applications such as labelling cars if they are too close. To do this well, you need to track the driver’s viewpoint and compensate for the curve of the windscreen. The company expects a $3.8 billion market by 2020.
Many components add potential distortion to the image – including different driver shapes and sizes as well as assembly and windscreen variance. Windscreens are very cost competitive and are not made with the high dimensional accuracy needed for optics.
Geo has a calibration system at the dealer (and factory) level to automatically align and compensate the image for variations, but the cost has to be kept down to drive market adoption.
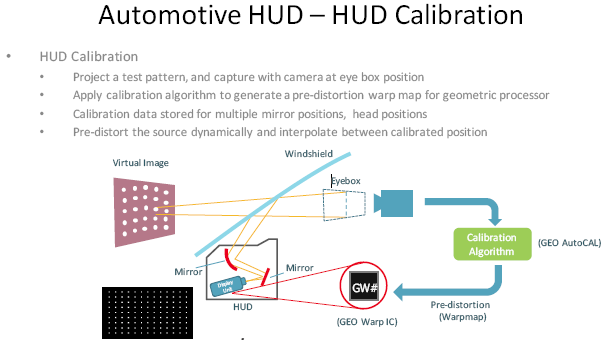
The processor pre-distorts the image on a frame by frame basis to compensate for the distortion introduced. It’s better if this is done in the HUD, so that the central controller does not have to do anything, as it has a lot to do. During alignment, the system puts out a fixed pattern that is then compared to a captured image to calculate the variance. The camera does not have to be aligned if there is an external frame around the image, so a simple jig can be used.
The processor can support 60 fps to compensate for the movement of the driver’s head and Tan showed a video with real time changed processing to compensate for movement by the driver’s head.