Researchers from the Universities of Cambridge, Oxford and University College London have developed an advanced augmented reality (AR) holographic system that projects 4K video using LiDAR point clouds, specifically designed for automotive head-up displays. This technology significantly enhances road safety by displaying real-time, 3D holographic images that align with real-world objects in both size and distance, providing drivers with a comprehensive view of potential road hazards.
in a comparison of the selected projected regions (dashed regions). (Source: Advanced Optical Materials)
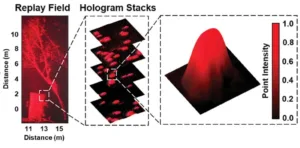
The system utilizes light detection and ranging (LiDAR) data, transformed into detailed 3D images, and leverages GPU-accelerated computing to create holograms faster than traditional CPU processing. This offers an augmented view of the road, maintaining the driver’s focus and significantly reducing the risk of accidents due to human error.
Unlike existing 2D heads-up displays that project onto a small part of the windshield, this technology keeps the driver’s eyes focused on the road. The 3D projections provide information about hazards from any angle in the driver’s field of view without being distracting or overwhelming.
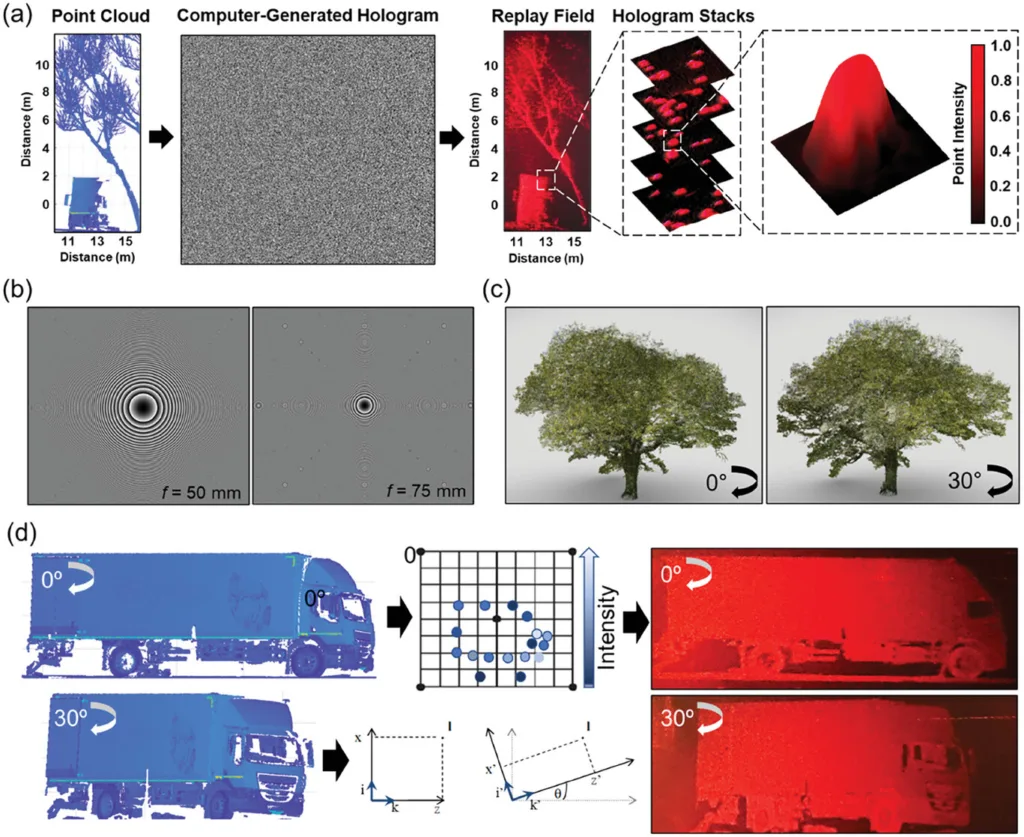
The researchers used LiDAR to capture extremely detailed scans with up to 400,000 data points for a single object. Specialized data processing techniques extract only the most essential information to generate the holograms in real-time. This allows for a 360-degree assessment of potential obstacles on busy, constantly changing streets.
The data collected can also be stored and shared via the cloud to create a crowd-sourced platform that provides real-time hazard awareness for all vehicles passing through an area.
The researchers are now collaborating with Google to test the system in actual vehicles, with road trials potentially beginning in 2024. The team aims to develop an inclusive system to improve safety for all road users.
Reference
J. Skirnewskaja, Y. Montelongo, J. Sha, P. Wilkes, T. D. Wilkinson, Accelerated Augmented Reality Holographic 4k Video Projections Based on Lidar Point Clouds for Automotive Head-Up Displays. Adv. Optical Mater. 2023, 2301772. https://doi.org/10.1002/adom.202301772